Rotary Inverted Pendulum: A Control Systems Experiment Platform
The Rotary Inverted Pendulum is an educational platform for advanced control theory, designed for hands-on experiments in system modeling, LQR, and nonlinear dynamics.
🧭 About the Project
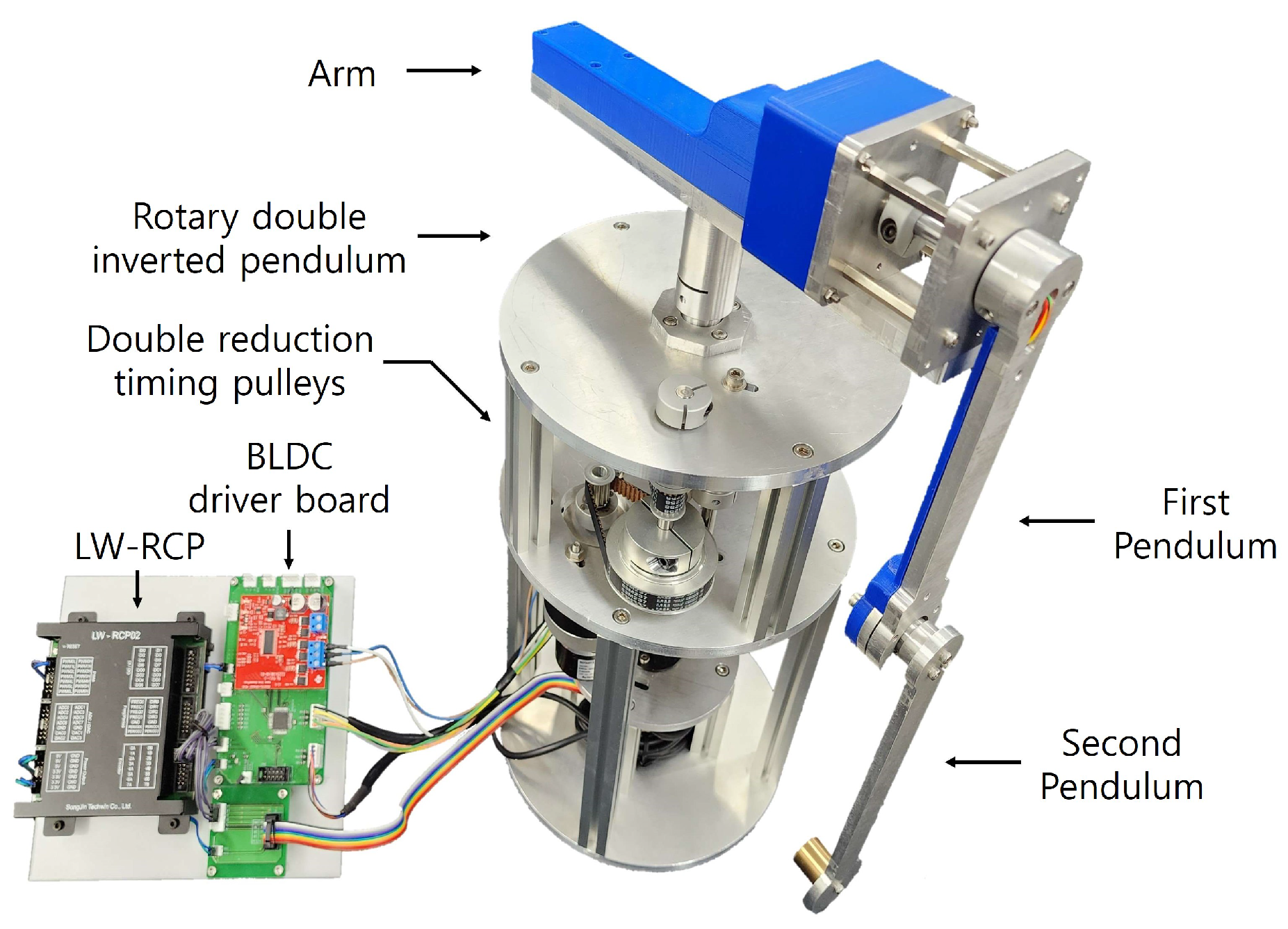
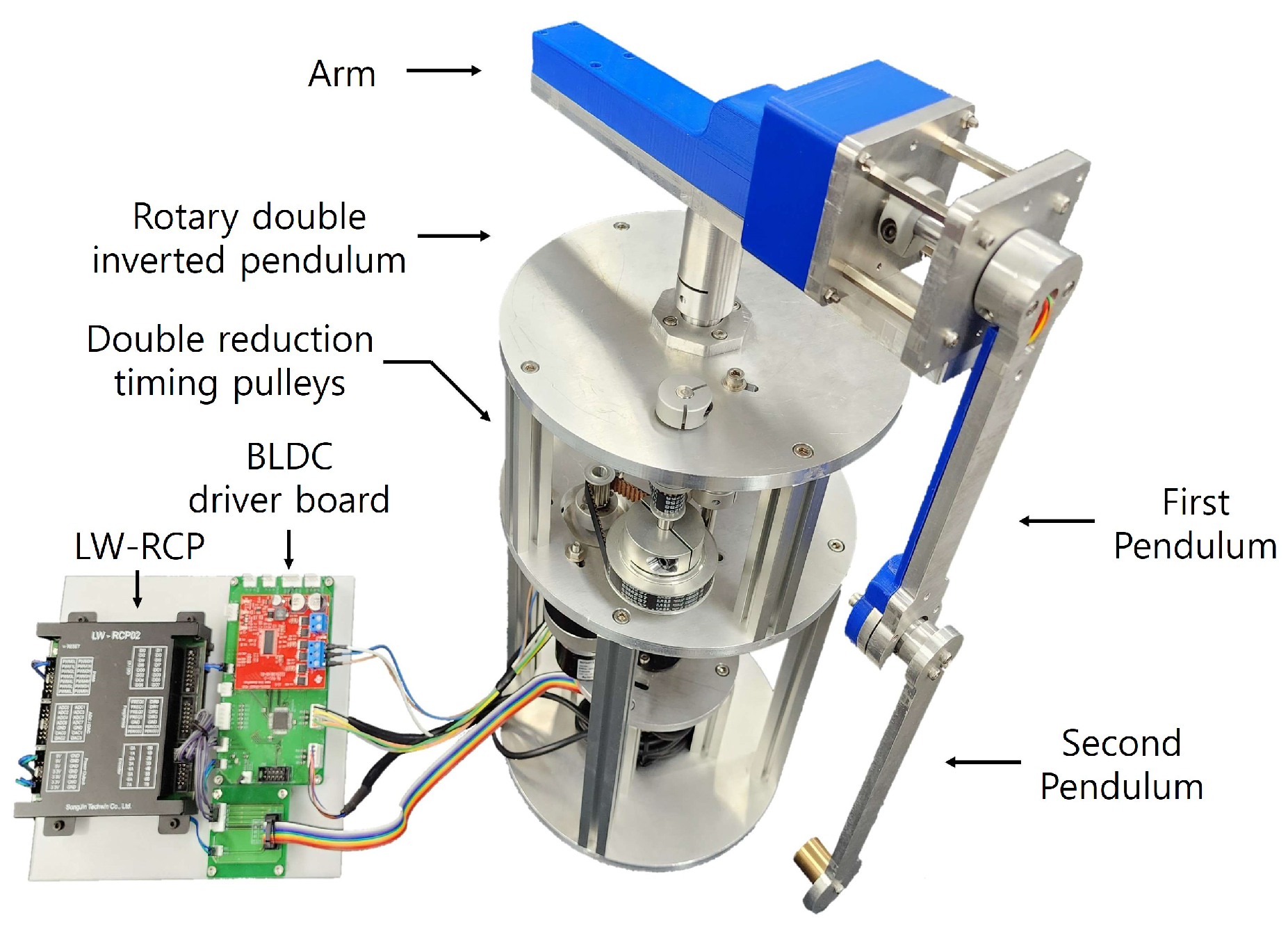
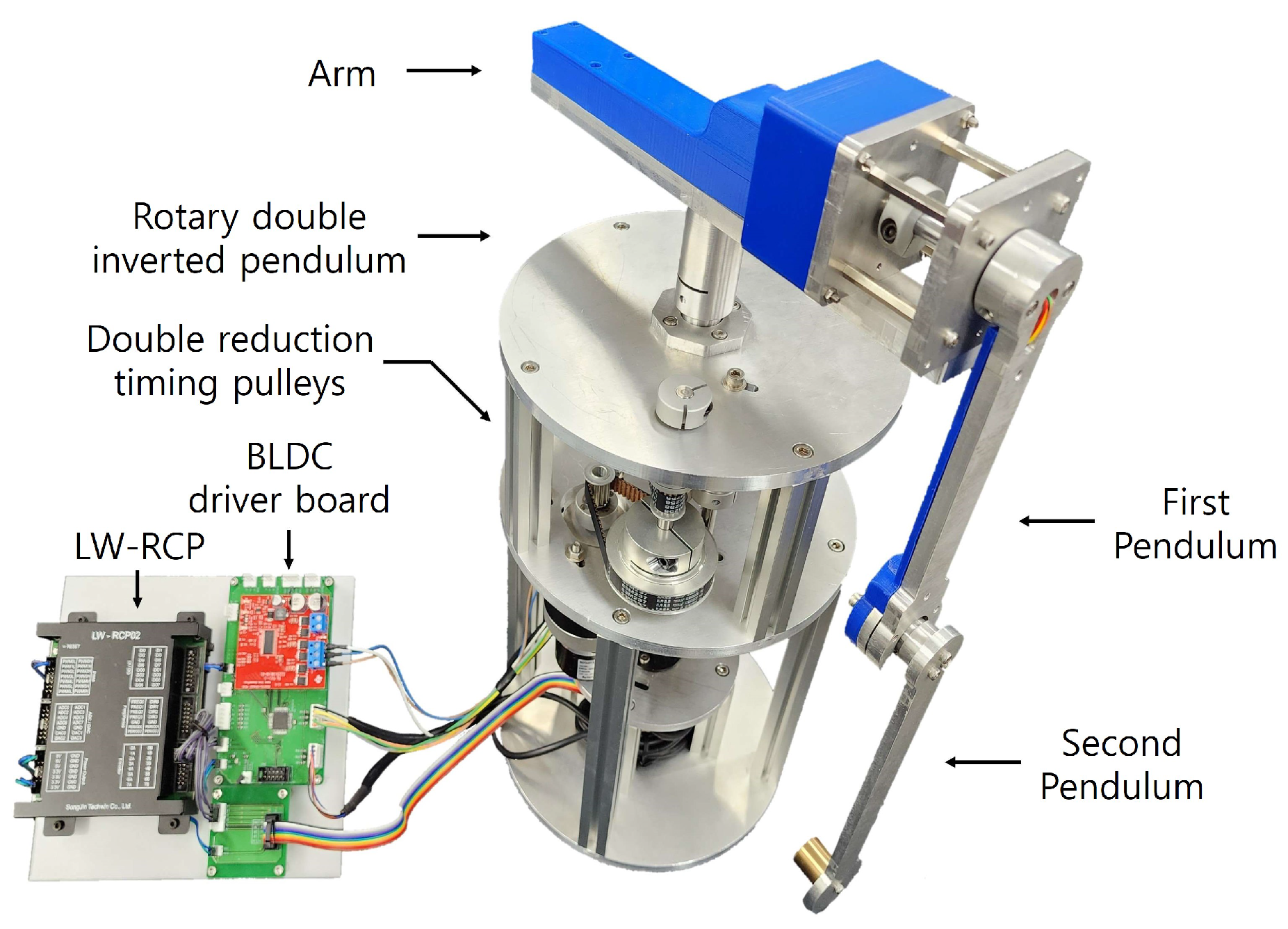
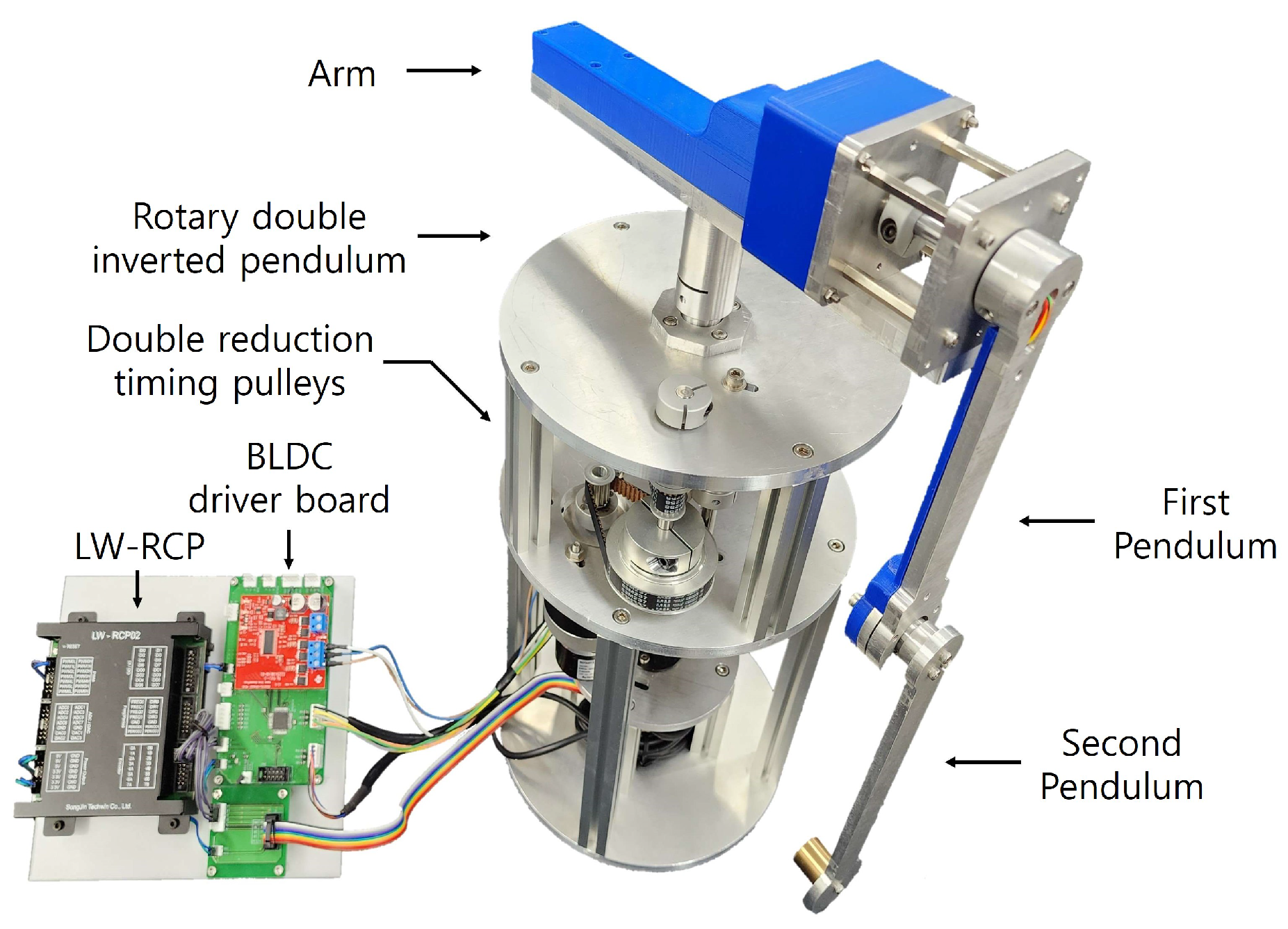
The Rotary Inverted Pendulum is a classic benchmark system in control engineering, designed to test a variety of control strategies under nonlinear and underactuated dynamics. This project provides a 3D-printable and modular version of the platform, suitable for both undergraduate and graduate-level education.
It consists of a rotary base driven by a DC motor, with a rigid pendulum attached at the end. The system is both nonlinear and unstable, requiring sophisticated controllers to maintain the upright position of the pendulum.
✨ Key Features
- Open-loop and closed-loop control experiments
- Model-based simulation using MATLAB and Python
- Implementation of PID, LQR, and state observer designs
- High-resolution rotary encoder for angular feedback
- Educational resources for modeling, linearization, and controller synthesis
🛠️ Educational Objectives
The Rotary Inverted Pendulum is ideal for:
- Control systems laboratories
- Graduate-level nonlinear control coursework
- Hands-on demonstrations of state-space modeling
- Benchmarking real-time control algorithms
📦 Files & Documentation
- Complete CAD files for 3D printing
- Electronics schematics and PCB layout
- MATLAB/Simulink and Python models for simulation and control
- Setup and tuning guides for real-time experiments
Let me know if you’d like to add links to GitHub, a DOI to a paper, or a BibTeX entry for citation.